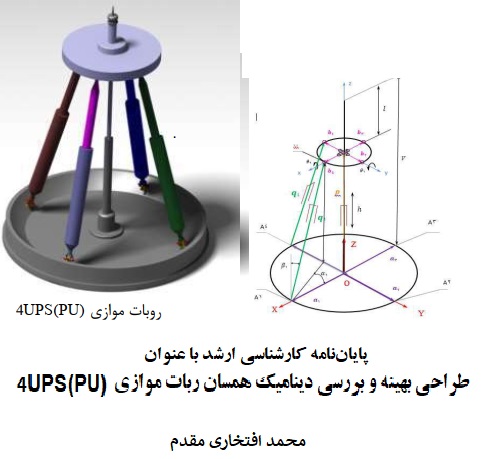

این پایاننامه با عنوان «طراحی بهینه و بررسی دینامیک همسان ربات موازی 4UPS(PU)» به تحلیل یکی از ساختارهای پیشرفته در حوزه رباتیک میپردازد. رباتهای موازی از جمله سیستمهای مکانیکی چند حلقهای هستند که به دلیل دقت بالا، سختی ساختاری زیاد و ظرفیت بار مناسب در کاربردهایی مانند شبیهسازها، ماشینهای CNC پیشرفته و سیستمهای جراحی رباتیک استفاده میشوند.در این پژوهش، ساختار 4UPS(PU) مورد بررسی قرار گرفته است؛ سیستمی که شامل چندین زنجیره حرکتی موازی بوده و تحلیل آن نیازمند مدلسازی دقیق سینماتیکی و دینامیکی است. مباحثی مانند ماتریس ژاکوبین، تحلیل سرعت و شتاب، فضای کاری (Workspace)، و پایداری حرکتی در این نوع رباتها اهمیت اساسی دارند.در کنار این موضوع، منابعی مانند «Dynamics of Parallel Robots» و مقالات مرتبط با رباتهای موازی 4-UPS و 4-PSS نیز برای درک بهتر ساختارهای مشابه پیشنهاد میشوند.چرا رباتهای موازی پیچیدهتر از رباتهای سری هستند؟پاسخ این است که در رباتهای موازی چند زنجیره حرکتی همزمان بر موقعیت نهایی تأثیر میگذارند و همین موضوع باعث پیچیدگی در تحلیل سینماتیک و دینامیک میشود.
محصولات مرتبط

دانلود حل المسائل ترمودینامیک ون وایلن ویرایش ششم PDF | پاسخنامه تشریحی Thermodynamics Van Wylen

دانلود حل المسائل مکانیک سیالات استریتر PDF | پاسخنامه تشریحی Fluid Mechanics

حلالمسائل طراحی اجزای شیگلی زبان اصلی-Solution’s Mechanical Engineering Design




جزوه تهویه مطبوع به زبان ساده همراه با تمرین دانلود PDF | آموزش کاربردی HVAC



علیرضا قادری – دانشجوی دکتری رباتیک:
«نحوه مدلسازی در این پایاننامه خیلی دقیق و منطبق بر مبانی ریاضی بود. یکی از کاملترین منابع برای طراحی رباتهای موازی محسوب میشه.»
نگار طاهری – پژوهشگر مکانیزمهای موازی:
«تحلیل ایزوتروپی دینامیک در این پروژه بهخوبی نشون میده که چطور میشه عملکرد یکنواختی در رباتهای چند مفصلی داشت. ارزش علمی بالایی داره.»
این پایاننامه در حوزه رباتیک پیشرفته قرار دارد و تمرکز اصلی آن بر بهینهسازی طراحی و کاهش اثرات دینامیکی نامطلوب در ساختارهای موازی است. اهمیت این موضوع در افزایش دقت، کاهش نوسان و بهبود کنترل سیستم بسیار بالاست.
🧩 تحلیل فنی و محتوایی
مهمترین بخشهای این پژوهش شامل موارد زیر است:
- مدلسازی سینماتیکی ربات 4UPS(PU)
- استخراج معادلات دینامیکی سیستم
- تحلیل ماتریس ژاکوبین و شرایط تکینگی
- بهینهسازی پارامترهای هندسی
- بررسی رفتار دینامیکی در فضای کاری
p=mvp = mvp=mv
m1m_1m1
kg
m2m_2m2
kg
vvv
m/s
📌 نکته مهم:
در این نوع رباتها، تغییرات سرعت و شتاب نقش مهمی در پایداری کل سیستم دارند.
🧠 پیامهای کلیدی
- رباتهای موازی دقت بالاتری نسبت به رباتهای سری دارند
- تحلیل دینامیکی در این سیستمها بسیار پیچیده است
- بهینهسازی هندسی باعث بهبود عملکرد و کاهش خطا میشود
- ژاکوبین نقش کلیدی در کنترل و تحلیل حرکت دارد
- تکینگیها یکی از چالشهای اصلی طراحی هستند
⚖️ مقایسه واقعی با پژوهشهای مشابه
🔸 در برابر ربات 4-PSS یا 4-UPU
- ساختار مشابه اما تفاوت در نوع مفصلها
- هر تغییر در مفصلها روی دینامیک کل سیستم اثر میگذارد
📌 نتیجه:
4UPS(PU) معمولاً انعطافپذیری بیشتری در طراحی دارد
🔸 در برابر رباتهای سری (Serial Robots)
- سری: تحلیل سادهتر، دقت کمتر
- موازی: دقت بالا، تحلیل پیچیدهتر
📌 نتیجه:
این پایاننامه در حوزه سیستمهای دقیق و صنعتی پیشرفته قرار دارد
📊 امتیازدهی سیستم
معیارامتیاز
| عمق علمی | 10/10 |
| پیچیدگی فنی | 10/10 |
| کاربرد صنعتی | 9.5/10 |
| نوآوری طراحی | 9/10 |
| ارزش پژوهشی | 10/10 |
📌 امتیاز کلی: 9.7/10
🧠 سطح سختی مطالعه
- سطح خواندن: سخت
- سطح تحلیل: بسیار سخت
- سطح پژوهشی: پیشرفته
📌 دلیل:
نیاز به تسلط بر دینامیک، رباتیک پیشرفته و جبر خطی دارد.
💡 ارزش واقعی پایاننامه
این پژوهش برای افرادی مناسب است که:
- در حوزه رباتیک و مکاترونیک فعالیت دارند
- روی طراحی رباتهای صنعتی و دقیق کار میکنند
- به تحلیل دینامیکی سیستمهای چند درجه آزادی علاقهمندند
📌 نکته کلیدی:
قدرت این کار در «ترکیب طراحی بهینه با تحلیل دینامیکی دقیق» است.
🏁 جمعبندی نهایی
این پایاننامه یکی از موضوعات پیشرفته در رباتیک موازی است که با تمرکز بر طراحی بهینه و تحلیل دینامیکی ربات 4UPS(PU)، به بهبود عملکرد، دقت و پایداری سیستمهای رباتیکی در کاربردهای صنعتی کمک میکند.
دیدگاه خود را بنویسید